Все значения, взятые для расчета, (вроде площади мембраны,
массы груза и обьема поплавка) сняты с реальной модели.
Проверялась теоретическая возможность работы подобной системы,
а так-же зависимости характеристик отдельных компонентов.
Все прочие данные и расчетные формулы взяты из справочников.
Рассмотрим систему
На груз действуют силы
-притяжения
-давления воды (через мембрану)
-давления газа (через мембрану)
-сила Архимеда (уменьшает массу груза)
-сила Гаусса (от мембраны при перемещении<>0)
 Плотность воды
Плотность воды
 Плотность материала груза (кг/м3) (свинец)
Плотность материала груза (кг/м3) (свинец)
 Масса груза (одно плечо)
Масса груза (одно плечо)

 Обьем груза
Обьем груза

 Сила Архимеда, действующая на груз
Сила Архимеда, действующая на груз

 Результирующая сила тяжести, действующая на груз
Результирующая сила тяжести, действующая на груз
 Радиус вращения колеса
Радиус вращения колеса
 Глубина погружения центра колеса
Глубина погружения центра колеса

 Сечение мембраны
Сечение мембраны

 Давление воды на мембрану
Давление воды на мембрану
Давление воды направлено всегда по ходу вращения и
совпадает по направления с касательнодействующей силой
тяжести

Для расчета положения поплавков интересно не значение давления,
а разница давлений на противоположные поплавки

Переводим давление в силу

Это разница сил, действующих на мембрану поплавка со стороны воды
положительное значение говорит о том, что на первый поплавок находится
выше,чем второй т.е. его обьем должен увеличится
Также на мембрану действуют силы от грузов.
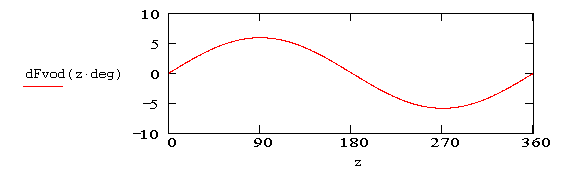
Зависимость силы тяжести за оборот (+ по пути вращения, - против вращения или
+ от центра, - к центру)




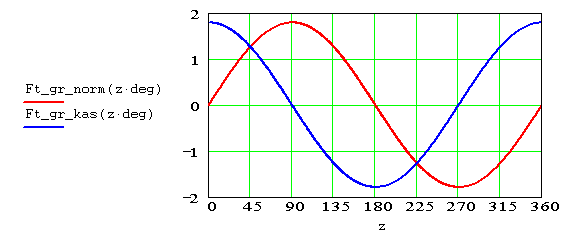
Разница этих сил (на противоположных поплавках)

Положительное значение говорит о том, что обьем первого поплавка должен увеличиваться
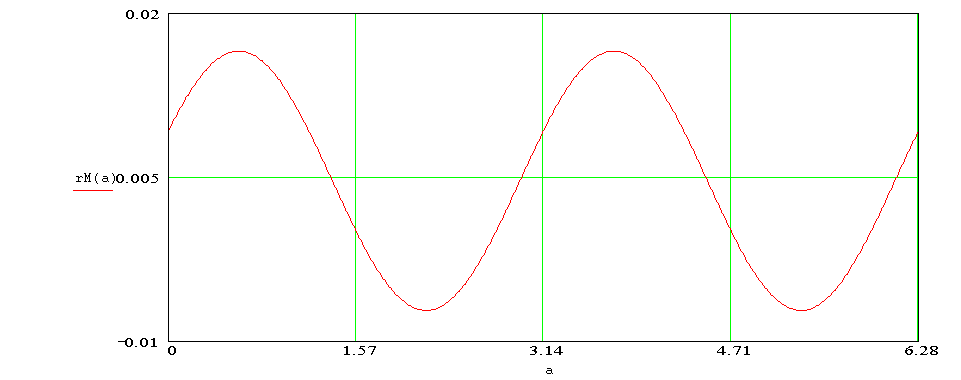
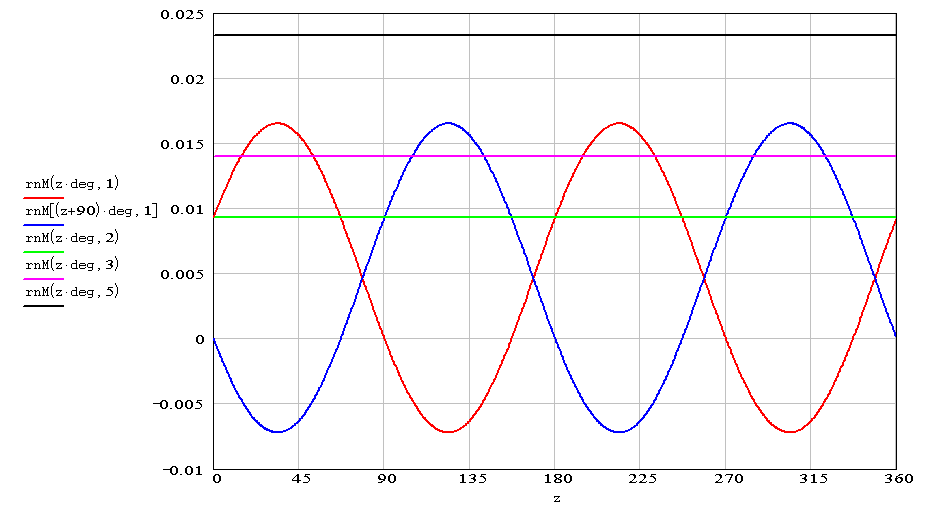
Теперь складываем силы от действия воды и действия груза

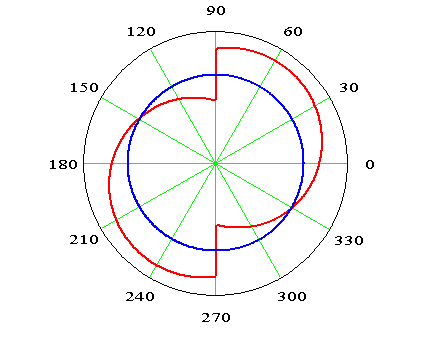
Более наглядно физический смысл полученного графика можно представить
круговой диаграммой

Здесь. Красной линией отрисована разность сил, действующих
на мембрану поплавка в зависимости от его положения. Синяя
введена только для наглядности представления.
Физический смысл заключается в том, что в положениях,
когда красная линия находится выше (дальше от центра)
синей, обьем первого поплавка, а следовательно и выталкивающая
сила, действующая на него, больше, чем обьем второго, и наоборот.
Система по умолчанию крутится против часовой стрелки. Следовательно,
при углах поворота от (примерно) 330 градусов, до 90 градусов
действующий на систему момент будет положительным. Далее, от
90 гр. до 150гр. - отрицательным. Потом, до 270 гр. -
снова положительным, и, до 330 гр. - отрицательным.
Сразу замечу, что изменение параметров системы в сторону
увеличения действия на обьем поплавков силы тяжести
(увеличение массы грузов), кроме собственно изменения
количественных показателей, приводит к "повороту"
результирующего графика (красной линии) по часовой стрелке,
что, с одной стороны, приводит к уменьшению тормозящей
части графика, но, с другой стороны, так-же приводит
к уменьшению влияния действующего на систему давления
воды. Для получения наилучших характеристик требуется
примерно равное влияние этих двух видов воздействия,
т.е. рабочую характеристику нужно выбирать из условия минимума/минимума
действующих сил при угле поворота в 45 градусов.
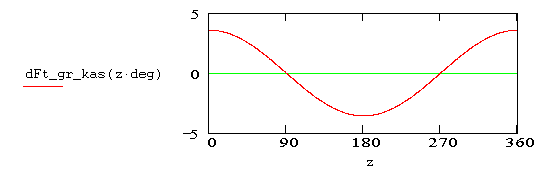
Кроме графического, можно получить цифровое выражение полученых зависимостей.
Для этого преобразуем функции так, чтобы их результатом было
"полезное" изменение обьема. Т.е. на участке 270 - 90 гр.
(по часовой стрелке) берем саму функцию, а на участке 90-270 градусов -
со знаком минус. Этим мы выразим то, что при переходе через
верхнюю/нижнюю точки изменение обьема поплавков становится
из "полезного" "вредным" и наоборот.

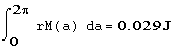
Интеграл полученой функции характеризует изменение обьема поплавков,
а с ним, собственно, и результирующий момент.

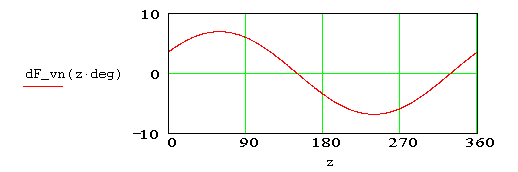
Это выражение показывает результирующий момент системы из
одной пары поплавков за один полный оборот. Он не равен
нулю, значит система должна поддерживать самовращение.
Графически это можно представить так.
Однако здесь рассмотрена идеальная система. У
реальной системы параметры зависят от многих факторов.
Например, здесь не учитываются реальные изменения обьемов
поплавка. Только его относительные величины
(мало того - они здесь даже не расчитываются.
Просто принимаются пропорциональными разности давлений).
Данное допущение приводит к заведомой неверности количественной
оценки процессов, но никоим образом не влияет на качественную.
Так-же не учитывается изменение центра тяжести поплавка при его
перемещении (за счет перемещения груза) и жесткость мембраны.
Для окончательной проверки необходимо пересчитать систему с
учетом всех этих факторов.
1- расчитаем систему, в которой грузы поплавков подвешены на элластичных
мембранах без дополнительных устройств по стабилизации их положения.
2- Для описания положения груза разобьем сложное перемещение поплавков на
2 простых - перемещение по касательной к окружности и перемещение по нормали.
Тогда реальное перемещение груза можно представить как функции от изменения обьема
(касательное перемещение)и нормальнодействующей силы тяжести (нормальное перемещение)
3- Нормальное перемещение груза влияет на длинну рычага действия
силы тяжести. На длинну рычага действия Архимедовой силы оно не
влияет. Нормальное перемещение противоположно для противоположных поплавков.
4- Касательное перемещение приводит к повороту рычага действия.
Оно направлено в одну сторону для противоположных поплавков
(по или против вращения).
Вводим новые параметры
 Коэффициент жесткости мембраны в касательном направлении
Коэффициент жесткости мембраны в касательном направлении
 То же, но в нормальном
То же, но в нормальном
Переводим силу в перемещение груза по касательной

Коэфф 2 в знаменателе введен для того, чтобы показать,
что сила к обеим мембранам приложена одна, следовательно
компенсация ее достигается синхронной деформацией обеих мембран.
Переводим перемещение в угол поворота

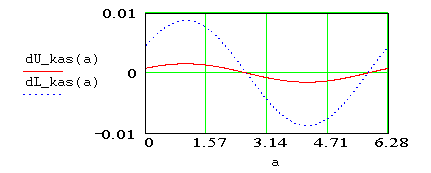
данная формула показывает изменение угла поворота рычага силы при вращении
(в радианах). Положительное значение говорит о повороте первого рычага
ПРОТИВ направления вращения системы, а второго ПО НАПРАВЛЕНИЮ вращения.
Теперь то-же, но по нормали

Положительное значение - длинна первого рычага увеличивается, а второго
уменьшается на значение
Теперь необходимо перевести значения перемещеня мембраны в изменение обьема.
Для упрощения формулы примем, что изменение обьема происходит только при
касательном перемещении мембраны (все расчеты собраны в этой формуле,
и при необходимости,всегда можно ввести доп. условия, влияющие на
обьем поплавка). При касательном перемещении = 0 обьемы поплавков
равны. Нам интересны не значения объемов, а их разность.
Положительное значение говорит о том, что обьем первого поплавка больше
обьема второго поплавка. На этот обьем действует сила Архимеда.
Смещение центра приложения этой силы не учитываем, т.к. считаем,
что изменение обьема много меньше свободного обьема поплавка.
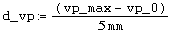
Считаем реальный момент, действующий на систему от действия силы Архимеда.
Положительное значение говорит о совпадении результирующего момента
с направлением вращения
Теперь расчитаем влияние на момент силы тяжести.
Рассмотрим номальные перемещения груза. Результирующий
момент складывается из разницы моментов противоположных плеч.
Касательные перемещения (через формулу угла поворота) являются
элементом коррекции.
M=Ftgr * ((R-dL_norm(a))-(R+dL_norm(a))
Это формула для расчета момента без учета влияния
касательных перемещений. Для их учета необходимо в
(R-dL_norm(a)) [определение длинны второго рычага]
вместо (а) вставить (a+dU_kas(a)), а в (R+dL_norm(a))
[определение длинны первого рычага] вместо (а) вставить (a-dU_kas(a))


Положительное значение говорит о совпадении результирующего
момента с направлением вращения
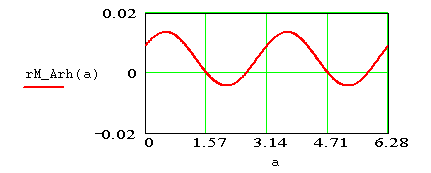
Получим выражение для результирующего момента

Положительное значение говорит о совпадении результирующего
момента с направлением вращения
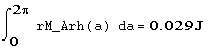

Данные интегралы показывают работу системы по замкнутому
контуру (за один оборот). Верхний - работу силы Архимеда.
Нижний - работу силы тяжести. Работа силы тяжести имеет в
7 раз меньший порядок, чем работа силы Архимеда, и направлена против вращения.
Теперь определим, сколько таких систем нам необходимо для самовращения.

Вывод - уже двух пар поплавков достаточно для самовращения системы.
На главную.
